pierwszy robot
07 czerwca 2019, 12:14
Nie wiesz jak zacząć budowę pierwszego robota? Zacznij od naszego kursu składania światłoluba.
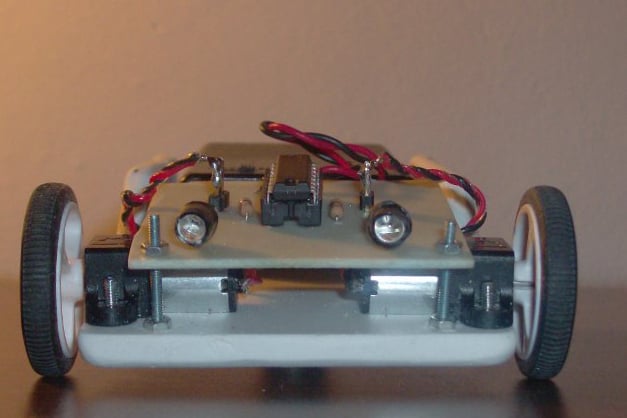
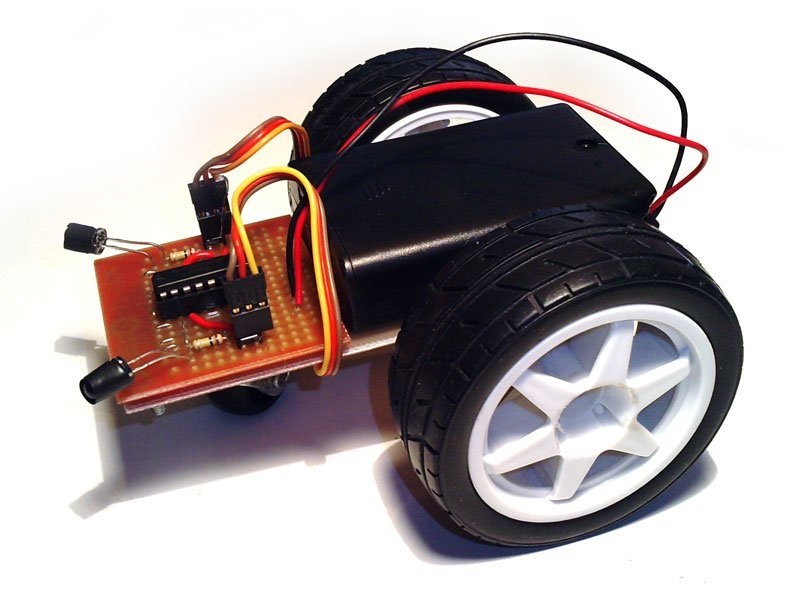
Jest to najprostszy robot, którego zadaniem jest podążanie w stronę źródła najsilniejszego światła. W praktyce zbudujesz pojazd, którym będziesz mógł sterować za pomoc zwyczajnej latarki!
Ze względu na spore problemy początkujących związane z budową tzw. "Waldemara Światłoluba", postanowiłem zaktualizować informacje ze starego artykułu (znajdującego się pod tym samym adresem), poprawić błędy w nim zawarte, wzbogacić treść o większą liczbą zdjęć i schematów. Dodatkowo zamieściłem FAQ obejmujące najczęściej pojawiające się pytania.
Do wszystkich czytających mam dużą prośbę - zanim napiszecie post z opisem problemu, jeszcze raz starannie przeanalizujcie ten tekst. Na 90%,
Zaczynamy
Celem artykułu jest łagodne wprowadzenie w świat robotyki. Nawet najobszerniejsza wiedza teoretyczna nie wystarczy do budowy zaawansowanych robotów, jeśli nie zdobędziemy chociaż minimum doświadczenia i nie poznamy czysto praktycznych problemów (często pomijanych w najróżniejszych lekturach).
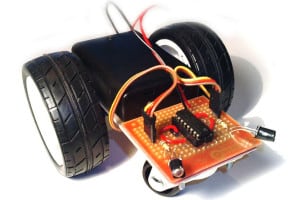
Aby zdobyć owo doświadczenie, zbudujemy naszego pierwszego robota! Jego zadaniem będzie podążanie w kierunku źródła światła (np. latarki w zaciemnionym pokoju), a do budowy wykorzystamy garść podzespołów. Od razu uspokajam - Waldemara Światłoluba nie trzeba programować, prawidłowo złożony i zasilony powinien zadziałać natychmiast po uruchomieniu.
Narzędzia
Aby zacząć budować roboty, musimy zaopatrzyć się w najpotrzebniejsze narzędzia. Bez nich nawet nie mamy co marzyć o karierze robotyka!
Lutownica - dla elektronika jest tym, czym piec dla piekarza. Kwestia wyboru lutownicy była wielokrotnie poruszana na forum: tutaj, tutaj, tutaj, tutaj, czy chociażby tutaj.
 Lutownica transformatorowa.
Lutownica transformatorowa. Lutownica kolbowa.
Lutownica kolbowa. Stacja lutownicza.
Stacja lutownicza.Multimetr - nawet nie próbujcie rozwiązywać problemów bez tego przyrządu. Przydaje się zawsze, gdy trzeba zmierzyć spadek napięcia na wybranym podzespole, rezystancję bliżej nieokreślonego opornika, szukać zwarć albo poznać np. maksymalny prąd pobierany przez silniki.
Na początek w zupełności wystarczy tania chińszczyzna (ok. 20zł), nie będzie też takiego miernika szkoda, jeśli w trakcie opanowywania podstaw pomiarów go uszkodzicie.

Przykładowy multimetr
Cyna - nie należy tej sprawy bagatelizować. Obecnie standardem są ołowiowe spoiwa lutownicze z rdzeniem zawierającym topnik, dlatego wystrzegam przed kombinowaniem i próbą "oszczędzania". Sama cyna nie wystarczy, ręczne "doprawianie" jej kalafonią na dłuższą metę nie ma sensu. Polecam firmę Cynel. Jaka średnica drutu? Na początek wystarczy fi=1mm (koszt ok. 2zł za fiolkę), chociaż cieńszą łatwiej się lutuje drobne, gęsto rozmieszczone elementy.

Fiolka cyny.
Odsysacz do cyny - ważna sprawa, jeśli bierzemy pod uwagę możliwość popełnienia błędu i chęć korekty (a to prędzej czy później każdemu się przytrafi). Do pierwszych prób polecam najtańszy.
Ja korzystam od kilku lat z popularnego OD-25 i regularnie czyszczony/smarowany spisuje się znakomicie. Odsysacza używa się w bardzo prosty sposób - naciągamy tłok, grzejemy niechciane łączenie lutownicą, aż spoiwo osiągnie postać płynną, a następnie przykładamy do spoiwa odsysacz i naciskamy guzik (pojawia się podciśnienie, które zasysa spoiwo do środka urządzenia).

Przykładowy odsysacz do cyny.
Cążki boczne - do odcinania końcówek przylutowanych elementów. W większości przypadków (małe średnice wyprowadzeń) można je zastąpić porządnymi nożyczkami.

Cążki boczne.
Hotglue - pistolet klejowy z wkładami uniwersalnymi - idealny do łączenia przeróżnych elementów "na szybko". Wkład uniwersalny trzyma się niemal każdego materiału, może służyć jako wypełnienie (klejone powierzchnie nie muszą do siebie przylegać) oraz bardzo szybko wiąże (proces można przyspieszyć schładzając naniesiony klej np. zimnym nadmuchem z suszarki).

Pistolet klejowy.
Układ napędowy - silniki oraz koła
Kwestia wyboru i konstruowania napędu jest chyba najważniejszą i najbardziej czasochłonną częścią budowy tego robota. Należy wiedzieć, że same silniki nie wystarczą! Potrzebna nam jest przekładnia mechaniczna, która zredukuje obroty na korzyść momentu obrotowego. Bez zastosowania przekładni, w najlepszym wypadku, robot zacznie się bardzo wolno rozpędzać do bardzo dużych prędkości. Przy czym najczęściej w ogóle nie ruszy z miejsca (koła będą się obracać tylko, kiedy będziemy trzymać go w powietrzu).
Pomysłów na rozwiązanie tego problemu jest bardzo dużo - polecam przejrzenie działu "konstrukcje początkujących", można tam znaleźć ciekawe, niskobudżetowe inspiracje. Należy zwrócić szczególną uwagę na maksymalny prąd pobierany przez silniki przy zasilaniu ok. 5V - jeśli jest większy niż 600mA, to istnieje szansa na spalenie układu L293D, który będziemy używać.
Gorąco polecam jednak zakup dwóch serw modelarskich. Dobrym wyborem są mikroserwa HXT900(hextronic), bardzo popularne na Allegro. Kosztują ok. 15zł/sztukę. Inna możliwość to zakup silników ze zintegrowaną przekładnią w różnych sklepach (sprawdź katalog firm). Zawsze warto rozglądać się również na Allegro pod hasłem "silnik DC z przekładnią" itp.

Mikroserwo z akcesoriami
Kupienie serw to nie wszystko - należy je nieco przerobić. W innym artykule bardzo szczegółowo opisałem jak tego dokonać: Serwa modelarskie w robotyce amatorskiej - Kompendium. Interesuje nas punkt II.1 ("Zdejmowanie blokady i obsługa jako zwykły silnik DC z przekładnią"), podpunkt "Przerabianie mikroserw".
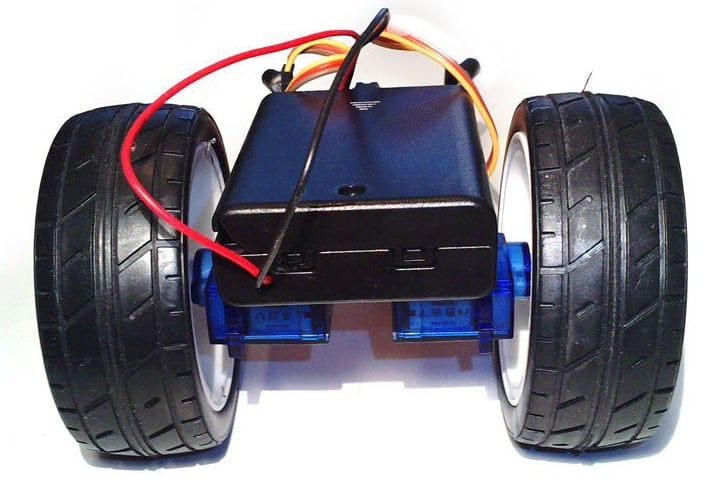
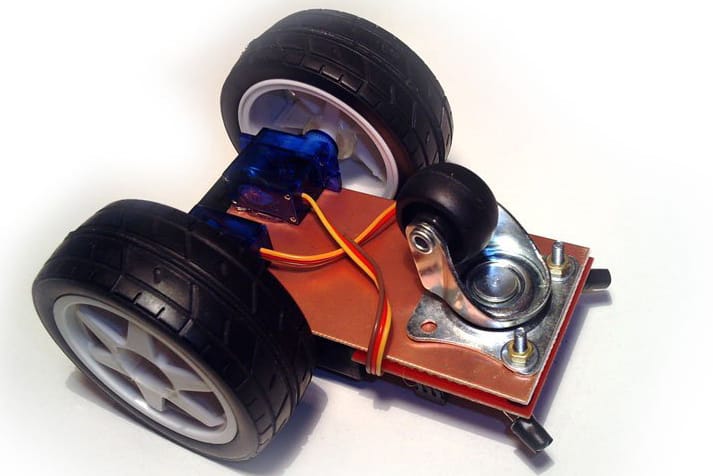
Kwestię wyboru kół pozostawiam Waszej pomysłowości. Jeśli chodzi o sposób poruszania się robota, to będzie podobny, jak w czołgu (coś w rodzaju napędu różnicowego). Potrzebujemy koło podporowe, aby robot się nie przewracał - zachęcam do wyprawy do sklepu np. Leroy Merlin i odwiedzenia działu meblowego. Można tam dostać za ok. 2-3zł kółka/kulki podobne, jak te zaprezentowane na poniższych zdjęciach.
 Koło obrotowe.
Koło obrotowe. Podpora
PodporaPotrzebne podzespoły elektroniczne
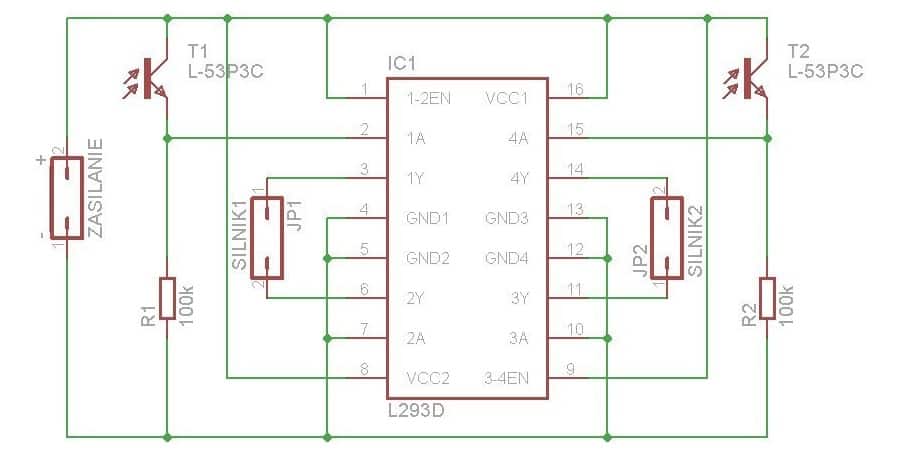
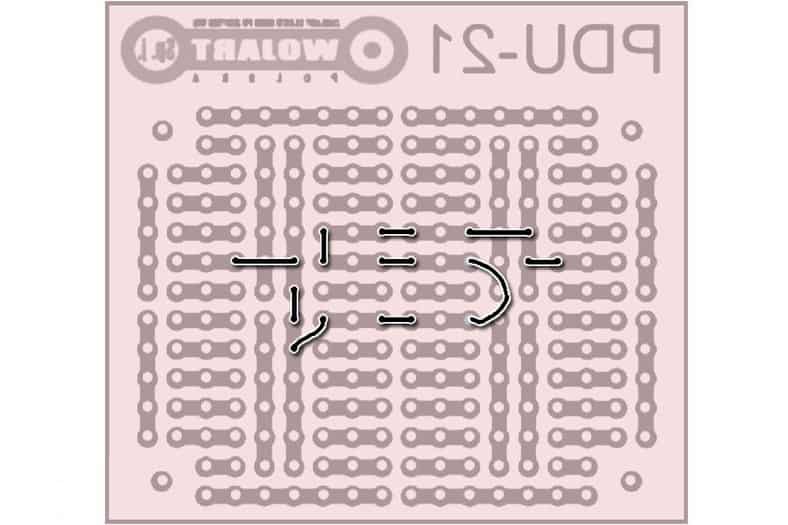
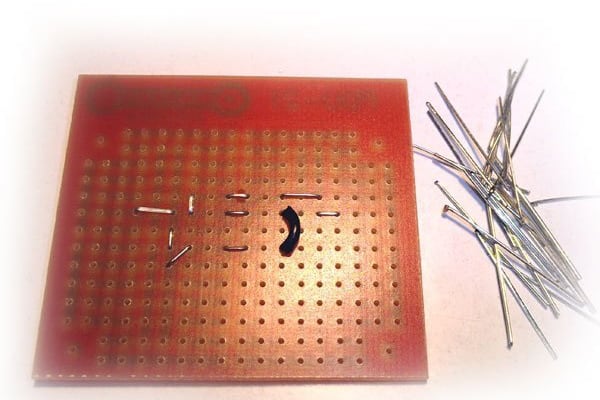
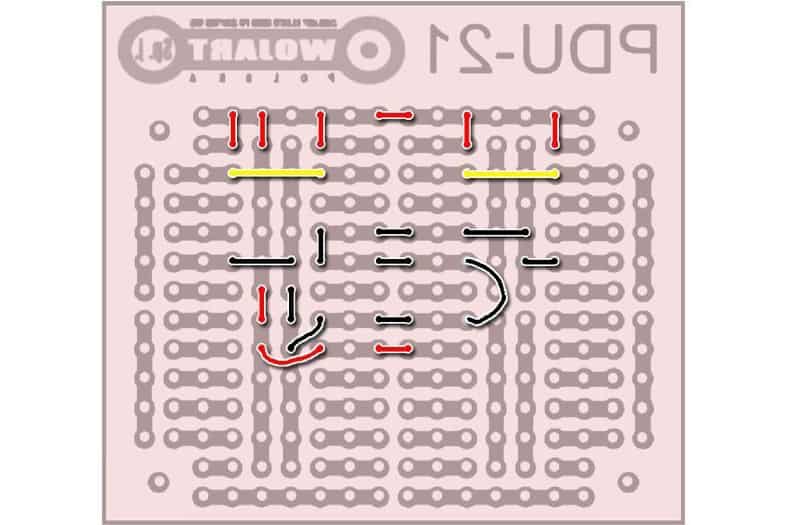
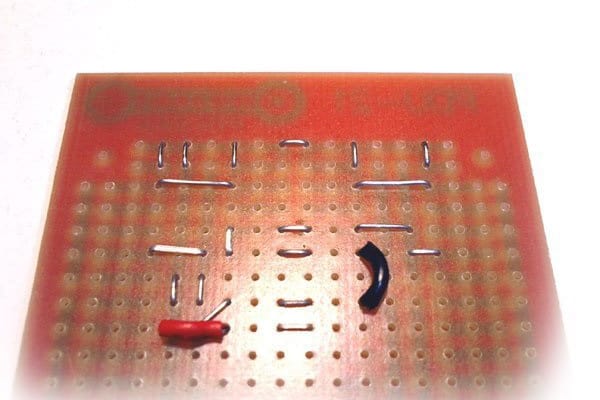
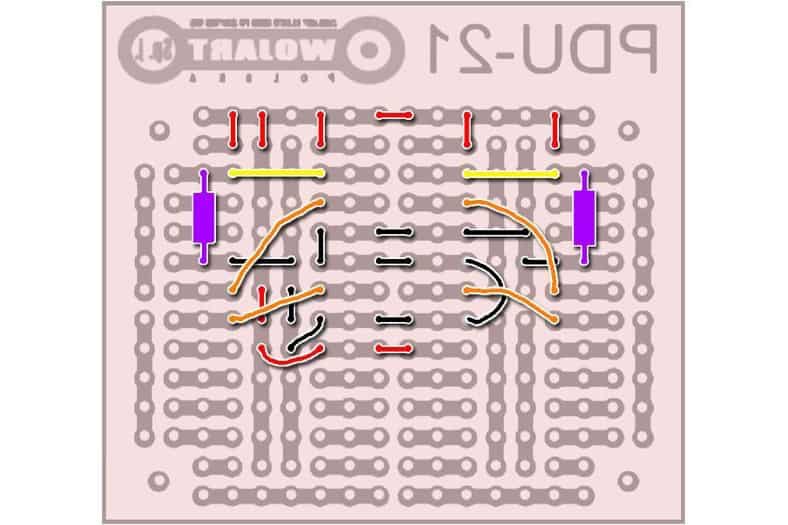
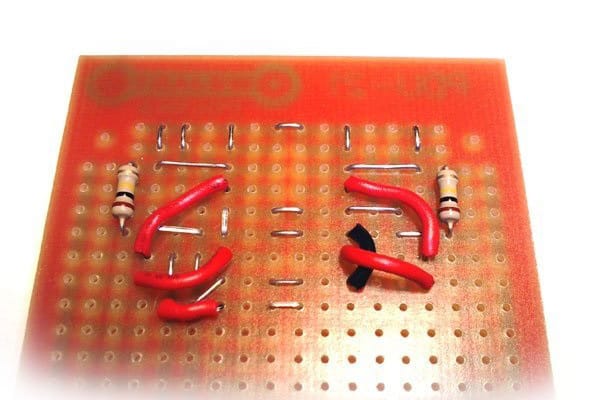
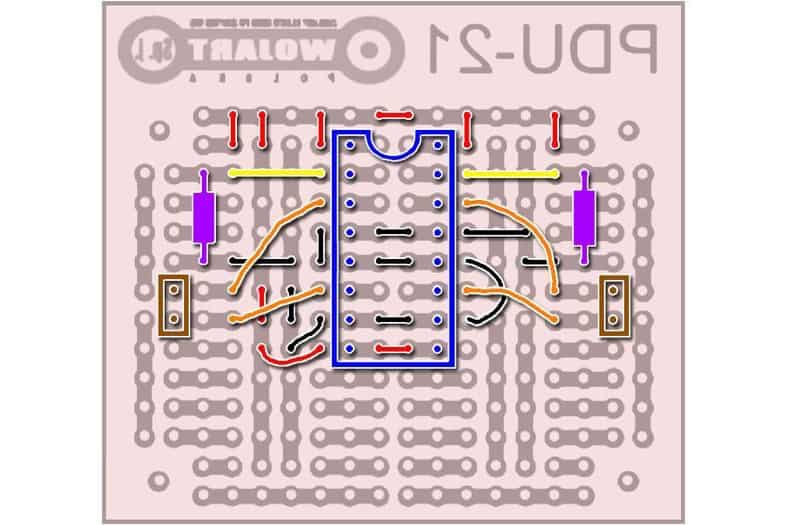
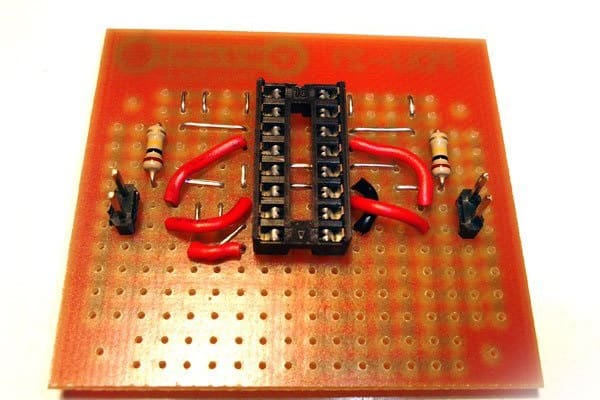
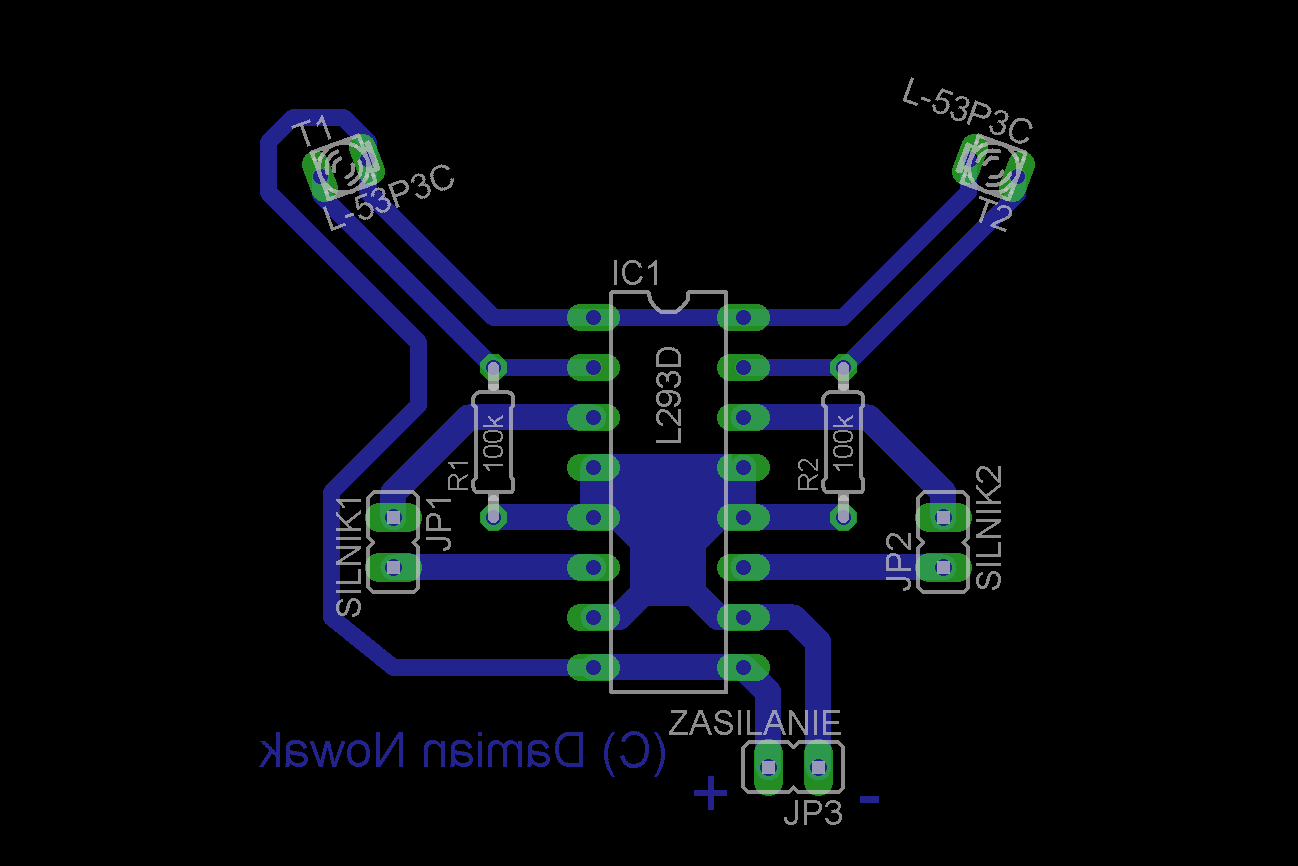
Płytka uniwersalna PDU-21 Układ L293D lub L293DNE - należy zwrócić uwagę na literkę "D" w nazwie - oznacza zintegrowane diody zabezpieczające przed przepięciami. Płytka uniwersalna.
Płytka uniwersalna. Układ L293D.
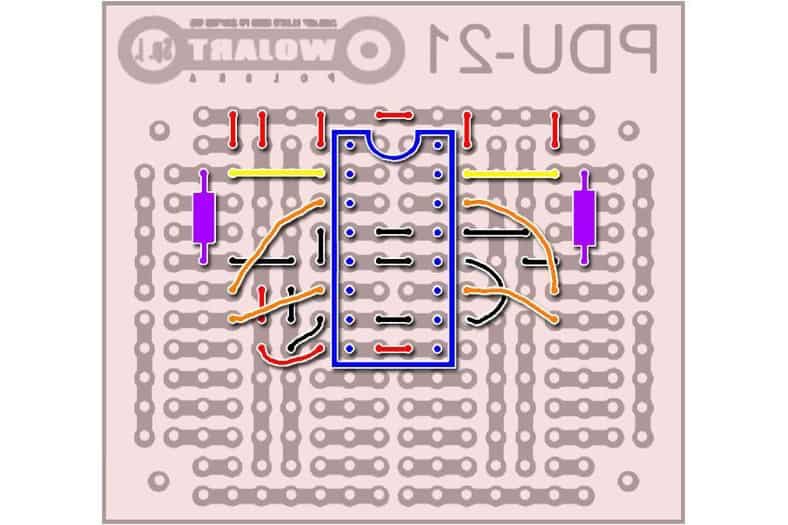
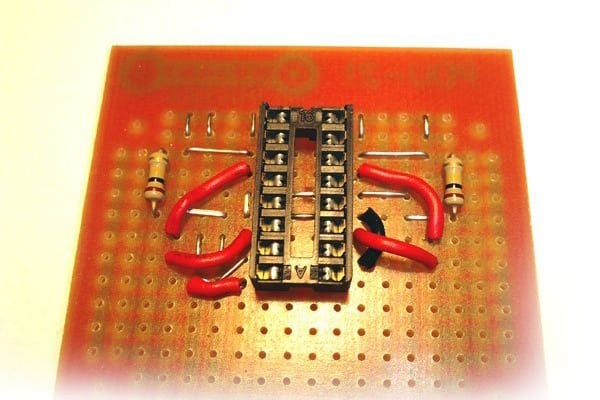
Układ L293D. Podstawka DIP.
Podstawka DIP. Fototranzystor.
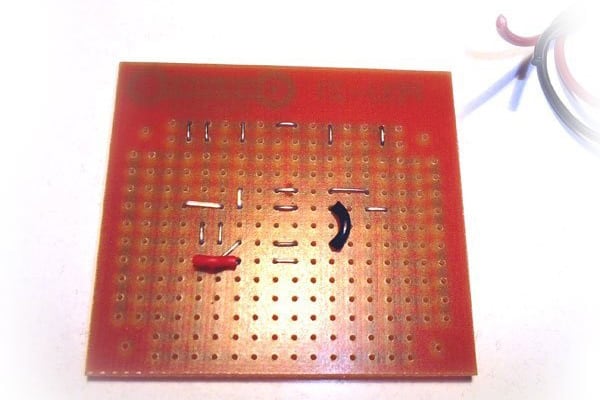
Fototranzystor. Rezystory.
Rezystory. Listwa goldpinów.
Listwa goldpinów.
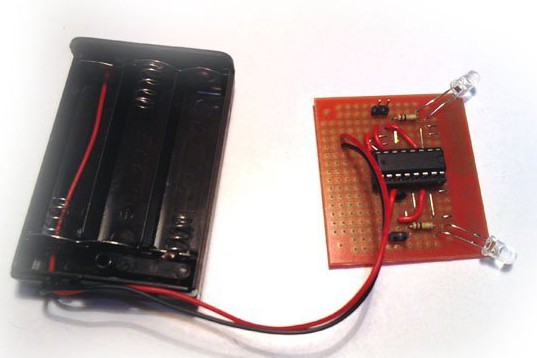
 Koszyk na baterie.
Koszyk na baterie. Przewody.
Przewody.